





KINEMATIKA - 4 kloubák - řídící úhel těhlice X rám
| Uživatel | Příspěvek |
Roman   Poslat zprávu | Profil |
Datum:
2.2. 2021
| Zobrazeno:
4890x Konfigurace CATIA: V5 R28 Text dotazu: Přiložené soubory: |
Ing Jan Cinert  Poslat zprávu | Profil |
[#6917]
| Publikováno:
05.02. 2021 - 14:09 Dobrý den,
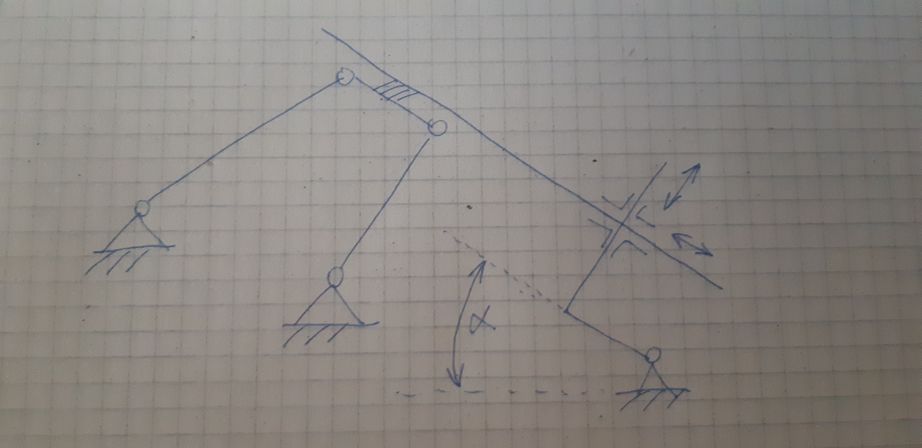
to co zmiňujete je jedna z možností, ale asi by to muselo být trochu jinak než píšete. Aby se úhel virtuálního partu shodoval s těhlicí, bylo by to jako na obrázku (ale možná jsem něco přehlédl a jde to jednodušeji. Druhou cestou je simulace pomocí Laws, kdy místo úhlu otevření použijete čas (např. 1s = 1 stupeň), vytvoříte rovnici pohybu těhlice vzhledem k jakémukoliv jinému commandu a tou rovnicí ho budete řidit v závislosti na čase (čas bude odpovídat úhlu otevření). Přiložené obrázky: |
|
Roman Poslat zprávu | Profil |
[#6918]
| Publikováno:
05.02. 2021 - 15:04 Dobrý den,
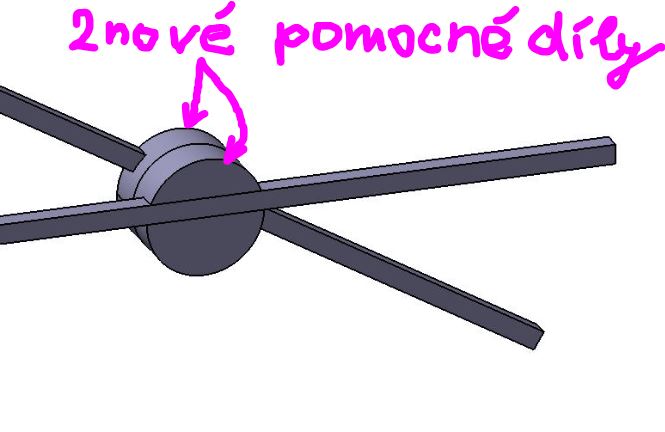
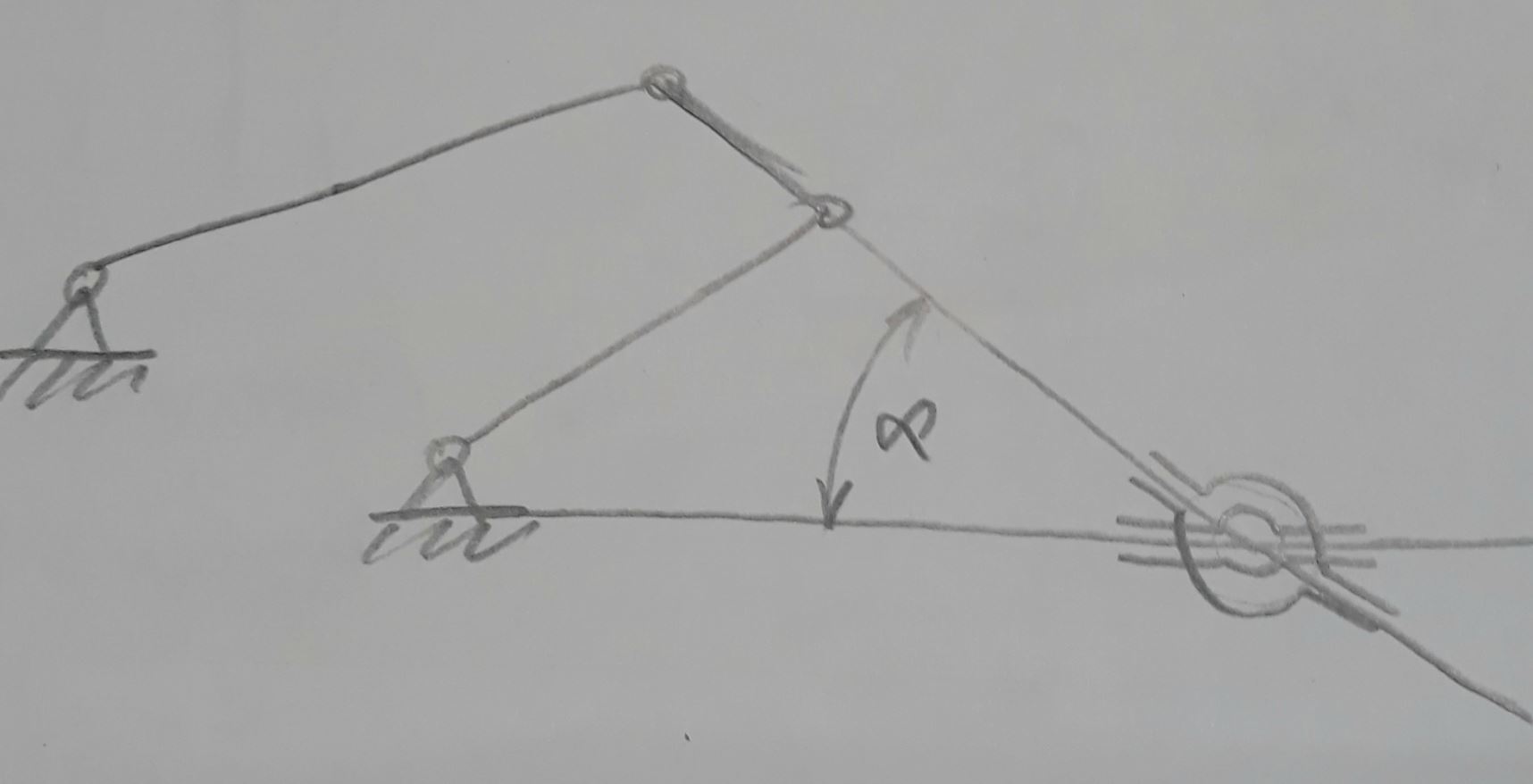
děkuji za reakci. Smiřuji se s tím, že to v té "pětce" jednoduše nepůjde. Já to mám vyřešené takto (viz obrázky). Je to samozřejmě principielně stejné jako váš návrh, jen mám tu rotaci zařazenou mezi ty 2 pomocné díly (nestačí jeden jak jsem psal původně). Tou rovnicí by to podle mne bylo o něco komplikovanější. CATIA5 už oproti CATIA4 nerozlišuje mezi 2D a 3D kinematikou a umí "pouze" 3D. Podle mne to právě uměla 2D kinematika v CATII4. Přiložené obrázky: |
|
Ing Jan Cinert Poslat zprávu | Profil |
[#6919]
| Publikováno:
06.02. 2021 - 10:13 Tak ty kinematické díly udělejte jen v "drátu" a schovejte je do flexible componentu (běžná praxe) a na to pak "navlékněte" (dress-up funkce) ty skutečné díly paralelogramu otvírání. |
|
Roman Poslat zprávu | Profil |
[#6920]
| Publikováno:
08.02. 2021 - 09:27 Dobrý den,
ano, samozřejmě, ty pomocné díly budou schované. Mám to tak jen pro názornost. Díky. |

Uživatel nepřihlášen
Pro zobrazení obsahu stránky / provedení akce (vytvoření nového téma, napsání odpovědi do diskuse apod.) musíte být přihlášeni.

