





Kinematika trojúhleníku s jedním fixním bodem
| Uživatel | Příspěvek |
Brendn   Poslat zprávu | Profil |
Datum:
3.4. 2019
| Zobrazeno:
7573x Konfigurace CATIA: V5-6 R2016, KIN Text dotazu: Přiložené obrázky: |
|
Roman Poslat zprávu | Profil |
[#6640]
| Publikováno:
05.04. 2019 - 09:59 Zdravím,
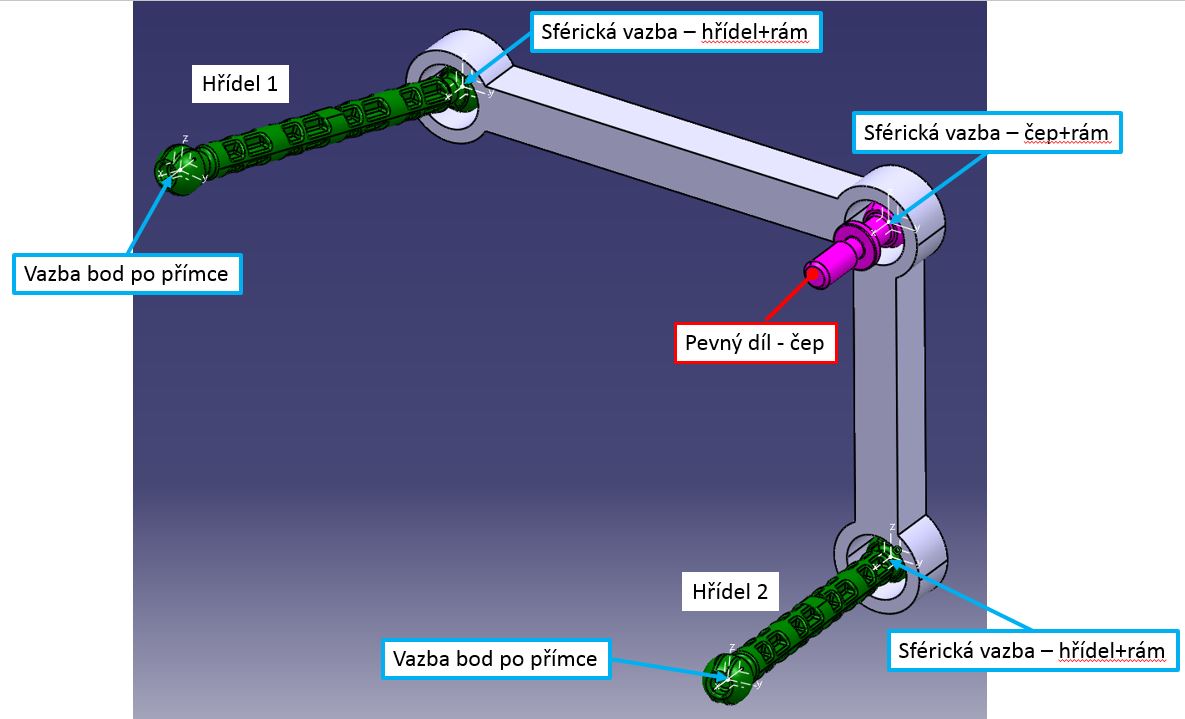
je potřeba zaměnit ty sférické vazby (hřídel+rám) za vazby "Universal joint" (je to vlastně Hookův kloub nebo také kardanův kloub). Tato vazba zamezí rotaci táhel kolem vlastní osy a sníží tedy celkový počet stupňů volnosti o 2. Zbytek budou hnací vazby. |
|
Brendn Poslat zprávu | Profil |
[#6643]
| Publikováno:
05.04. 2019 - 16:59 Dobrý den,
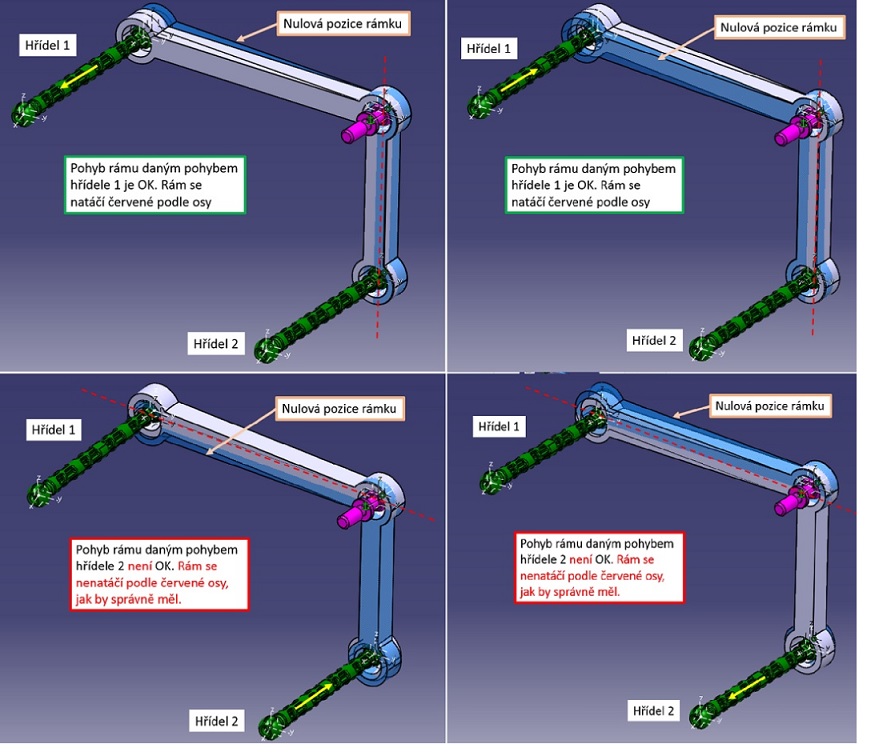
děkuji za reakci. Později jsem zkusil Universal joint a mechanismus mi šel rozpohybovat. Bohužel mi ale nejde rozpohybovat správně - poprvé mi to šlo, ale podruhé už jsem asi udělal nějakou jinou vazbu (osa x osa) a už se mi hýbal špatně. Správně se má mechanismus pohybovat vždy pouze pomocí jedné nastavovací tyče - když hýbu s první tyčí, druhá tyč je pevná a její střed a střed kulového čepu (fixní díl mechanismu) spolu vytvářejí osu, kolem které se má mechanismus natáčet. Naopak když pohybuji druhou tyčí, první tyč se nepohybuje a její střed spolu se středem kulového čepu vytváří osu, kolem které se mechanismus vykyvuje druhým směrem... Nyní se mi podařilo mechanismus zavazbit tak, že jedna nastavovací tyč funguje správně (druhá se při pohybu první nehýbe), ale když pohybuji s druhou tyčí, pohybuje se i první a pohyb mechanismu je špatně... zkusil jsem to zobrazit na přiloženém obrázku. Mohl byste mi poradit, jak správně vytvořit dané Universal jointy? Děkuji za radu, Tomáš. Přiložené obrázky: |
Uživatel nepřihlášen
Pro zobrazení obsahu stránky / provedení akce (vytvoření nového téma, napsání odpovědi do diskuse apod.) musíte být přihlášeni.

