





DMU Kinematics
| Uživatel | Příspěvek |
Dodous   Poslat zprávu | Profil |
Datum:
25.5. 2010
| Zobrazeno:
13050x Konfigurace CATIA: Text dotazu: |
Ing Jan Cinert  Poslat zprávu | Profil |
[#544]
| Publikováno:
25.05. 2010 - 21:09 Každá podsestava se chová v rámci rodičovské sestavy jako jeden pevný celek, i když v ní není definovaná žádná vazba. Mělo by vám pomoci, když přepnete podsestavu z módu rigid do flexible. Stiskněte pravé tlačítko nad instatancí podsestavy a v kontextové nabídce zvolte Flexible/Rigid Sub-assembly (nebo v panelu Constraint, symbol dvou hydromotorů). Ikonka sestavy ve stromu se obarví narůžovo a podsestava se dá "řídit" zvenku.
V příloze jsem vytvořil malý příklad (válec zvedá rameno). Zkuste si měnit úhel natočení ramena - píst se bude posouvat ve válci. Pokud přepnete mód na rigid a změníte úhel, při updatu dojde k chybě. Přiložené soubory: |
|
Dodous Poslat zprávu | Profil |
[#545]
| Publikováno:
26.05. 2010 - 20:47 Děkuji Janu Cinertovi za radu, díky jemu už mi jde dát dohromady sestava. Jen mi to nejde rozhýbat v Kinematics. Při vytváření kinematických vazeb mi vyskakuje hláška, že mám moc příkazů (too many commands). Mám ale zadaný pouze jeden příkaz a to v řídící (nadřazené) sestavě, v podsestavách nemám příkaz žádný. Podsestava ani nedovolí vytvořit vlastní simulaci (není příkaz, ani pevný díl - pro správnou fci by neměl být třeba). Ale i přesto v Properties řídícího mechanismu je příznak možnosti simulace YES, mělo by se to tedy hýbat. Při dvojkliku na mechanismus se zobrazí dialogové okno simulace, ale nejde mi s tím pohnout.
Nejde mi to protože: 1. Je potřeba aby podřízené mechanismy mohly být samostatně simulovány? 2. Je to proto, že tam mám mnoho příkazů, i když je jen jeden? 3. Dělám to úplně špatně a jsem ***? :-D 4. Jiný důvod? Je tu někdo ochotný se mi na celou sestavu podívat a poradit s rozhýbáním? |
|
Dodous Poslat zprávu | Profil |
[#546]
| Publikováno:
26.05. 2010 - 21:01 Ještě přikládám obrázky s Properties. Přiložené soubory: |
Kamil  Poslat zprávu | Profil |
[#547]
| Publikováno:
28.05. 2010 - 14:26 Pošli mi ten súbor na email, simulaciam sa venujem, rád pomôžem, a toto ma zaujima, rád sa niečo priučim. |
|
Dodous Poslat zprávu | Profil |
[#548]
| Publikováno:
28.05. 2010 - 15:37 Děkuji, máš sestavu v emailu. Jsem zvědavý, jak to dopadne. |
|
Dodous Poslat zprávu | Profil |
[#562]
| Publikováno:
03.06. 2010 - 20:17 Tak mechanismus mi už funguje. Nakonec jsem to celé předělal. Ještě mi zbývá udělat prezentační video. |
|
akademikrichard Poslat zprávu | Profil |
[#1038]
| Publikováno:
19.08. 2010 - 20:20 mám další dotaz O:-) dá se v catii v modulu kinematika zavazbit více jak jedno těleso k základnímu rámu pokaždé když chci zavazbit druhé se mi původní vazba smaže a vymění za novou díky za odpověď |
|
akademikrichard Poslat zprávu | Profil |
[#1042]
| Publikováno:
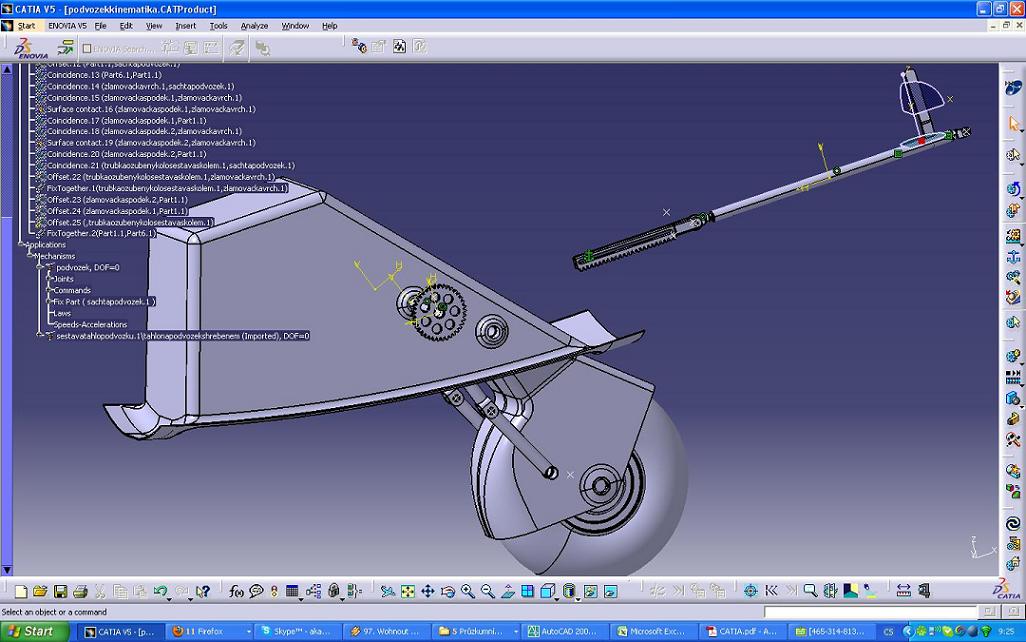
20.08. 2010 - 09:34 Potřebuji zavazbit ozubené kolo a hřeben na obrázku z tutorialu na youtube jsem pochopil že při tvorbě vazby rack joint musí být osa otáčení a kluzná plocha na jednom tělese které je zavazbené k základnímu rámu(kotva) je tomu skutečně tak nebo se to dá nějak šikovně obejít? případně nenapadá někoho řešení moji situace na obrázku děkuji moc za odpovědi Přiložené obrázky: |
|
akademikrichard Poslat zprávu | Profil |
[#1077]
| Publikováno:
24.08. 2010 - 08:52 nějak se mi to podařilo rozběhnout simulace šla spustit bez problémů a vše fungovalo jak mělo když jsem ale druhý den simulaci spustil znovu zčervenal mi jeden díl a přitom den předem vše fungovalo jak mělo znamená to že mám někde špatně vazbu? už z toho začínám být pomalu jelenO:-) |

Uživatel nepřihlášen
Pro zobrazení obsahu stránky / provedení akce (vytvoření nového téma, napsání odpovědi do diskuse apod.) musíte být přihlášeni.

